HotRIO master rx
This module receives HotRIO packets from the PCS and checks the parity bits. The module outputs the received packet and the parity error flag.
Ports
Name |
Mode |
Description |
Type |
|---|---|---|---|
clk_i |
IN |
Input clock signal, must be connected to the RX clock of the PCS |
std_logic |
rstn_i |
IN |
Active-low reset signal, synchronized to the clock internally |
std_logic |
rx_pcs_data_i |
IN |
8-bit interface from the PCS |
std_logic_vector(7 downto 0) |
rx_pcs_kchar_i |
IN |
k-character flag |
std_logic |
hotrio_packet_o |
OUT |
Contains the HotRIO packet received |
hotrio_packet_t* |
packet_new_o |
OUT |
Flag that indicates that a packet has been received, even if not valid |
std_logic |
packet_valid_o |
OUT |
Flag that indicates that a valid packet has been received and is available in the hotrio_packet output |
std_logic |
pulse_2us_o |
OUT |
Pulse that signals that a “2us” marker has been received |
std_logic |
pulse_1ms_o |
OUT |
Pulse that signals that a “1ms” marker has been received |
std_logic |
pulse_1s_o |
OUT |
Pulse that signals that a “1s” marker has been received |
std_logic |
sync_o |
OUT |
High when the internal state machine is synchronized with the incoming data |
std_logic |
cnt_err_kchar_o |
OUT |
Counts the k-character errors, when an unexpected k-char is received |
std_logic_vector(CONFIG_DATA_WIDTH - 1 downto 0)** |
cnt_err_data_o |
OUT |
Counts the data errors, for example for when a non-HotRIO marker is received |
std_logic_vector(CONFIG_DATA_WIDTH - 1 downto 0)** |
cnt_err_hrio_pid_o |
OUT |
Counts the number of non-HotRIO frames received |
std_logic_vector(CONFIG_DATA_WIDTH - 1 downto 0)* |
cnt_err_parity_o |
OUT |
Counts the number of parity errors detected |
std_logic_vector(CONFIG_DATA_WIDTH - 1 downto 0)* |
cnt_packets_received_o |
OUT |
Counts the amount of packets received (even if with errors) |
std_logic_vector(CONFIG_DATA_WIDTH - 1 downto 0)* |
cnt_valild_packets_received_o |
OUT |
Counts the amount of valid HotRIO frames received |
std_logic_vector(CONFIG_DATA_WIDTH - 1 downto 0)* |
* Defined in the Globals package
Dependencies
Name |
Motivation |
|---|---|
Types definition and HotRIO constants |
|
Used to synchronize the reset signal to the internal clock domain |
Implementation details
This module is implemented in a single state machine.
The state machine consists on seven states: SYNC, MARKER, PROTOCOL_ID, FRAME_ADDRESS, FRAME_PAYLOAD, FRAME_CONTROL and WAIT_FRAME.
The state machine starts in the SYNC state. In this state, the module waits for a HotRIO marker as defined in the global package. While in this state, the sync_o is kept to zero. If a k-character is received in states other than SYNC or MARKER, a check is implemented that flags an error and the SYNC state is selected. This will not be specified in the description of the various states as it’s the same for every one.
The MARKER state is used when the state machine is synchronized with the incoming data, it checks the received marker and if it matches drives the corresponding pulse output. If a non-HotRIO marker is received, the cnt_err_data counter is incremented and the SYNC state selected.
The PROTOCOL_ID state checks that the incoming packet is an HotRIO packet. If the protocol ID is correct, the state machine moves to the FRAME_ADDRESS state. However, if the protocol is not recognized, the WAIT_FRAME state is selected.
The WAIT_FRAME state is used when a non-HotRIO frame is received. During this state all the received data is forwarded without alteration. The length of the frame is not specified, it waits for a k-character. If a valid HotRIO k-character s received, the PROTOCOL_ID state is selected. If an unknown k-character is received, the SYNC state is selected.
In the FRAME_ADDRESS state, the address of the frame is received.
The FRAME_PAYLOAD state is used to receive the payload of the HotRIO packet byte-by-byte. A counter is used to keep track of the bytes received, the number of bytes in a HotRIO packet is defined in the global package as HOTRIO_BYTES_IN_PACKET.
The last state is the FRAME_CONTROL. In this state, the control byte is received. This byte contains the parity bits of the HotRIO packet that are checked against the generated bits to detect errors. The hotrio_packet output is updated with the received data even if an error has been detected. The packet_valid flag is asserted if the packet is valid, however, the packet_new flag is asserted in any case.
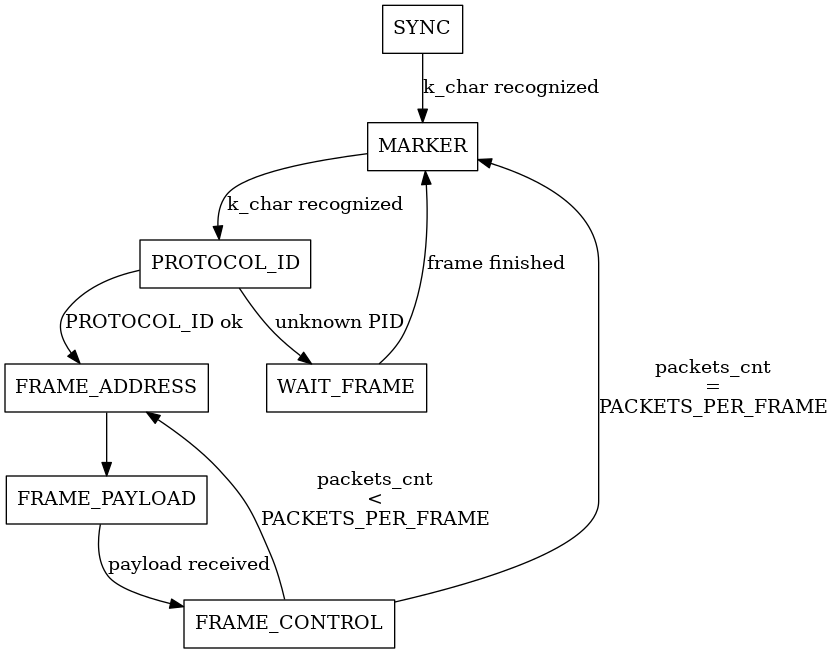
Note
The diagram of the state machine doesn’t contain the state transitions in case of error from all the states to SYNC. Moreover, the transitions names don’t correspond to the real signals names.